Flowers Laboratory
FLOWing Epigenetic Robots and Systems
Open-ended learning and development in machines and humans
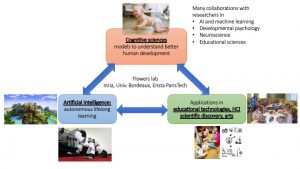
The Flowers project-team, at the Inria Center of University of Bordeaux and at Ensta ParisTech, studies models of open-ended development and learning. These models are used as tools to help us understand better how children learn, as well as to build machines that learn like children, i.e. developmental artificial intelligence, with applications in educational technologies, automated discovery, robotics and human-computer interaction.
A major scientific challenge in artificial intelligence and cognitive sciences is to understand how humans and machines can efficiently acquire world models, as well as open and cumulative repertoires of skills over an extended time span. Processes of sensorimotor, cognitive and social development are organized along ordered phases of increasing complexity, and result from the complex interaction between the brain/body with its physical and social environment.
To advance the fundamental understanding of mechanisms of development, the FLOWERS team develops computational models that leverage advanced machine learning techniques such as intrinsically motivated deep reinforcement learning, in strong collaboration with developmental psychology and neuroscience. In particular, the team focuses on models of intrinsically motivated learning and exploration (also called curiosity-driven learning), with mechanisms enabling agents to learn to represent and generate their own goals, self-organizing a learning curriculum for efficient learning of world models and skill repertoire under limited resources of time, energy and compute. The team also studies how autonomous learning mechanisms can enable humans and machines to acquire grounded language skills, using neuro-symbolic architectures for learning structured representations and handling systematic compositionality and generalization.
Beyond leading to new theories and new experimental paradigms to understand human development in cognitive science, as well as new fundamental approaches to developmental machine learning, the team explores how such models can find applications in robotics, human-computer interaction, automated discovery and educational technologies. In robotics, the team studies how artificial curiosity combined with imitation learning can provide essential building blocks allowing robots to acquire multiple tasks through natural interaction with naïve human users, for example in the context of assistive robotics. The team also studies how models of curiosity-driven learning can be transposed in algorithms for intelligent tutoring systems, allowing educational software to incrementally and dynamically adapt to the particularities of each human learner, and proposing personalized sequences of teaching activities.
The FLOWERS project-team is located on two sites: Inria Center of the University of Bordeaux and ENSTA-Paristech in Paris.
Address in Bordeaux

Inria Bordeaux Sud-Ouest
200, avenue de la vieille tour
33405, Talence
France
Address in Paris

U2IS
ENSTA ParisTech
828, bd des Maréchaux
91762 PALAISEAU CEDEX
France
Institutions
